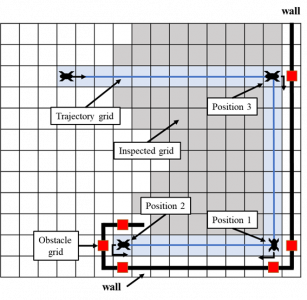
In this project, a novel autonomous inspection pipeline using low-cost micro aerial vehicles (MAVs) has been proposed in indoor assessment scenarios. First, a novel autonomous navigation and obstacle avoidance scheme has been developed for effective navigation and data collection.
 |
 |
| MAV navigation | Selected MAV |
Second, the collected images are live-streamed and processed by the real-time vision-based geotagging method and damage detection algorithms to localize structural components and damages. The proposed navigation algorithm has been examined on various floor plans with partition walls and common obstacles, where the results indicate that the algorithm can fully explore the floor plans investigated.

Floor plans investigated
In addition, the inspection pipeline has been validated for reinforced concrete (RC) structures in the real world. The results indicate that the pipeline can effectively explore the rooms and inspect the structural damages.
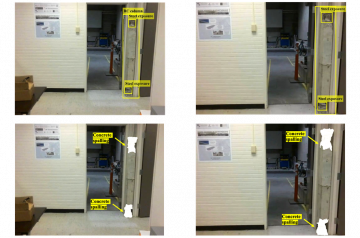
Real world demonstration: autonomous navigation and structural damage detection
Team composition: Sina Tavasoli, Xiao Pan, and T.Y. Yang
Reference:
[1] Tavasoli, S., Pan, X., & Yang, T. Y. (2023). Real-time autonomous indoor navigation and vision-based damage assessment of reinforced concrete structures using low-cost nano aerial vehicles. Journal of Building Engineering, 68, 106193.