Robotic technologies have been adopted into civil and structural engineering fields for the inspection of civil infrastructures. Robots can be divided into different categories based on their mobility, such as unmanned aerial vehicles (UAVs) (flying), unmanned ground vehicles (UGVs) (ground/surface-locked), climbing robots, robotic arms, and a collaborative scheme of these, etc. In general, compared to ground vehicles, the advantages of UAVs are their flexibility in flying at different altitudes and their ease in flying over ground obstacles, which makes them an ideal candidate to inspect the upper portion of large-scale civil structures such as high-rise buildings and bridges. UGVs, on the other hand, have much higher payload than UAVs, which allows them to carry more types of sensory and control units, and have prolonged battery life. Therefore, they are one of the best candidates for the interior investigation of buildings and pipelines.
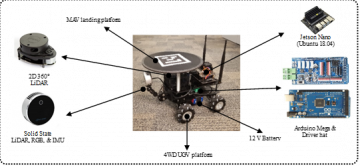
In this project, we are developing a collaborative UGV and UAV scheme, leveraging the advantages of both UAVs and UGVs, while alleviating the disadvantages of a single robot. For this purpose, we have customized UGV and UAV in the smart structures group, with dedicated sensor setup and control units to achieve full autonomous navigation and inspection.
 |
 |
 |
 |
| UGV 1 | UGV 2 | UAV 1 | UAV 2 |
UGV and UAV development in the Smart Structures Group
The robots can be virtually simulated in the ROS environment for testing the autonomous navigation and inspection algorithms.
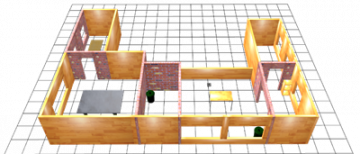
Virtual simulation
Once the algorithms are validated in the virtual environment, real-world demonstrations will be carried out.
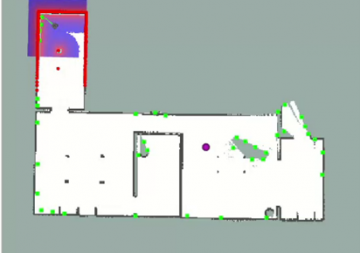
SLAM in a reinforcement concrete office building at The University of British Columbia
Team composition: Xiao Pan, Mohsen Azimi, Sina Tavasoli, Yingnan Bao, Yifei Xiao, Noroozinejad Farsangi, E., and T.Y. Yang
Reference:
Xiao, Y., Pan, X., Tavasoli, S., Azimi, M., Bao, Y., Yang T.Y. “Automated Inspection and Construction of Civil Infrastructures Using Robots.” Automation in Construction, edited by Ehsan Noroozinejad Farsangi, Mohammad Noori, Tony T.Y. Yang, Paulo B. Lourenço, Paolo Gardoni Izuru Takewaki, Eleni Chatzi, Shaofan Li. [under review]