Introduction:
Conventional construction is time-consuming and requires high labor numbers and large amount of plants on site. The construction quality is difficult to control and can be easily affected by weather. However, advanced modular and robotic construction can achieve faster construction, better quality control, lower environmental impacts, lower operating costs and wastage and reduce the number of injuries during construction. Currently, innovative modular steel floor system and modular damped H-frame system have been developed by our research team. The research goal of this project is to develop state-of-the-art control methods which can let ground vehicle robotic arm to assemble and install small structural components accurately, and develop ground vehicle robotic arm to grasp structural components and put them at specific positions accurately (with very small error) to form a whole structure system. The developed robotic arm will also help more advanced modular structures to be developed by our research team.
Research projects:
1. Smart construction using robots

Members: Yifei Xiao and T.Y. Yang

Members: Yifei Xiao, Xiao Pan, Fan Xie, Zhongwei Chen and T.Y. Yang
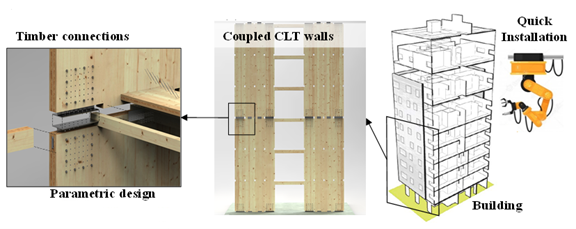
2. Timber structures
3. Volumetric modular construction
